304. Stationary objects introduction
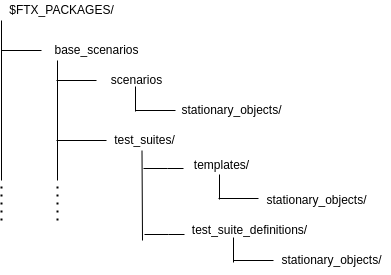
The Stationary objects library components are located in $FTX_PACKAGES/base_scenarios/scenarios/stationary_objects as shown in Figure 1.
| Directory/File | Description |
|---|---|
| test_suites | A directory containing a test_suite_definitions and a templates folder. The test_suite_definitions folder contains CSV files for executing stationary objects tests with FRun. The templates folder is used to generate tests to be executed with FRun. |
| scenarios | A directory containing the OSC2 source files for each scenario. |
304.1 Running a regression
To run a set of tests with FRun:
-
Invoke FRun in batch mode with all the CSV files required for the set of tests that you chose.
For example:
2. Review the regression results in the default work directory.frun --csv $FTX_PACKAGES/common/csv/sim_manually_driven_kinematic_config.csv --csv $FTX_PACKAGES/common/csv/map_config.csv --batch~/foretify/sessions/<timestamp>/<timestamp>/
304.1.1 Stationary object parameters
The following parameters are included, depending on the type of stationary object:
| Parameter | Description | Range |
|---|---|---|
| number_of_objects | For groups of objects, the number of objects | [2..5] |
| object_kind | The kind of object | stationary_vehicle, traffic_cone, puddle or person |
| vehicle_category | The category of the stationary vehicle | sedan, truck, bus, van, four_wheel_drive, motorcycle |
| person_age | The age group of the person | child, adult |
| person_gender | The gender of the person | male, female |
| time_of_day | The time of day the scenario happens | undefined_time_of_day, sunrise, morning, noon, afternoon, sunset, evening, night, midnight |
| specific_time | A specific time of day | [0..24]hour+[0..59]minute |
| drive_path_fraction | The point where the first object in the group is placed and expressed as a percentage of the total distance the car travels during the drive | [0..100] |
| ego_to_object_lat_offset | The distance of the object from the center line | [-2..2]m |
| min_lat_shift | Minimum lateral shift of each object | [-2..2]m |
| max_lat_shift | Maximum lateral shift of each object | [-2..2]m |
| min_distance_between_vehicles | The minimum distance between objects in a group | |
| max_distance_between_vehicles | The minimum distance between objects in a group | |
| drive_to_sync | The instance of the scenario used as a reference for the positioning of stationary object | |
| object_roll | Rotation along x-axis | [0..360]degree |
| min_yaw | Minimum rotation along z-axis | [0..360]degree |
| max_yaw | Maximum rotation along z-axis | [0..360]degree |
| object_yaw | Rotation along z-axis | [0..360]degree |
| object_pitch | Rotation along y-axis | [0..360]degree |