468. LKA lane hugger
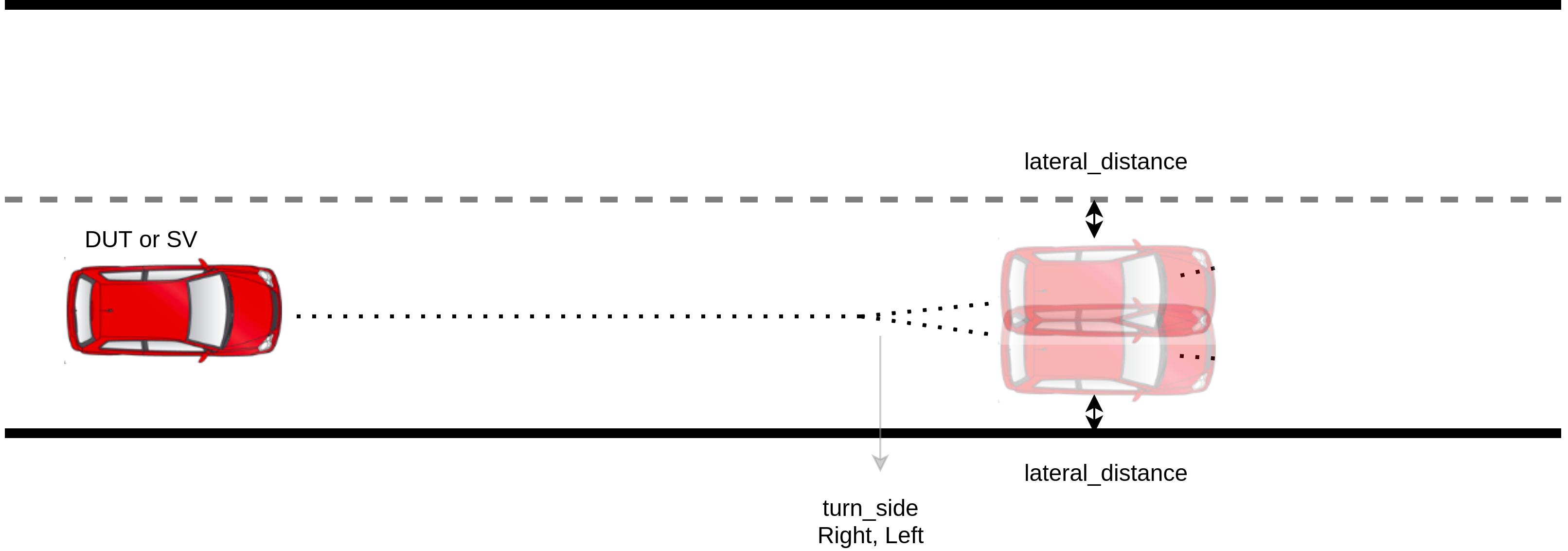
In this scenario the ego (DUT) drives on the road at center of a lane. It then moves laterally to either side of the lane with respect to lateral_offset and turn_side inputs.
468.1 Variants
- lka_lane_hugger
468.2 FRun parameters
| Configuration | Type | Range | Description |
|---|---|---|---|
| turn_side | side | right,left | ego moving side |
| lateral_offset | length | [0..0.1]m | Lateral distance from lane markings to side of ego (left_to_left,right_to_right) |
| duration | time | Time for lateral movement |
468.3 Coverage metrics
| Item | Unit / Type | Range | Description |
|---|---|---|---|
| turn_side | right,left | The side to which ego moves | |
| ego_lateral_offset | length (m) | range: [-2..2],every: 0.5 | Lateral offset of the ego from the center of the lane |
| ego_speed | speed (kph) | range: [10..100], every: 10 | Speed of ego when it starts to move laterally |
| ego_max_jerk | jerk (mpspsps) | range: [0..5], every: 1 | Maximum jerk of ego |
468.4 Checks
The check will fail if the following happens:
- LKA was not set to 'on' throughout the scenario
- LKA was activated even though the ego did not change lane
468.5 CSV files with Lane hugger parameters
$FTX/packages/adas/LSS/LKA/test_suites/test_suite_definitions/ego_lateral_movement
- lka_lane_hugger_main.csv
- lka_lane_hugger.csv