463. LDW lane departure
In this scenario the ego (DUT) drives on a predefined test path, where the shape and direction of the test path is determined by some input values.
463.1 Variants
- ldw_lane_departure
463.2 FRun parameters
| Configuration | Type | Range | Description |
|---|---|---|---|
| ego_speed | speed | [10..150]kph | ego longitudinal speed |
| lat_speed | speed | [0..1]mps | Lateral ego speed |
| r | length | [2..1500]m | Radius for the test path |
| psi | angle | [0.5..30]degree | Angle for the test path |
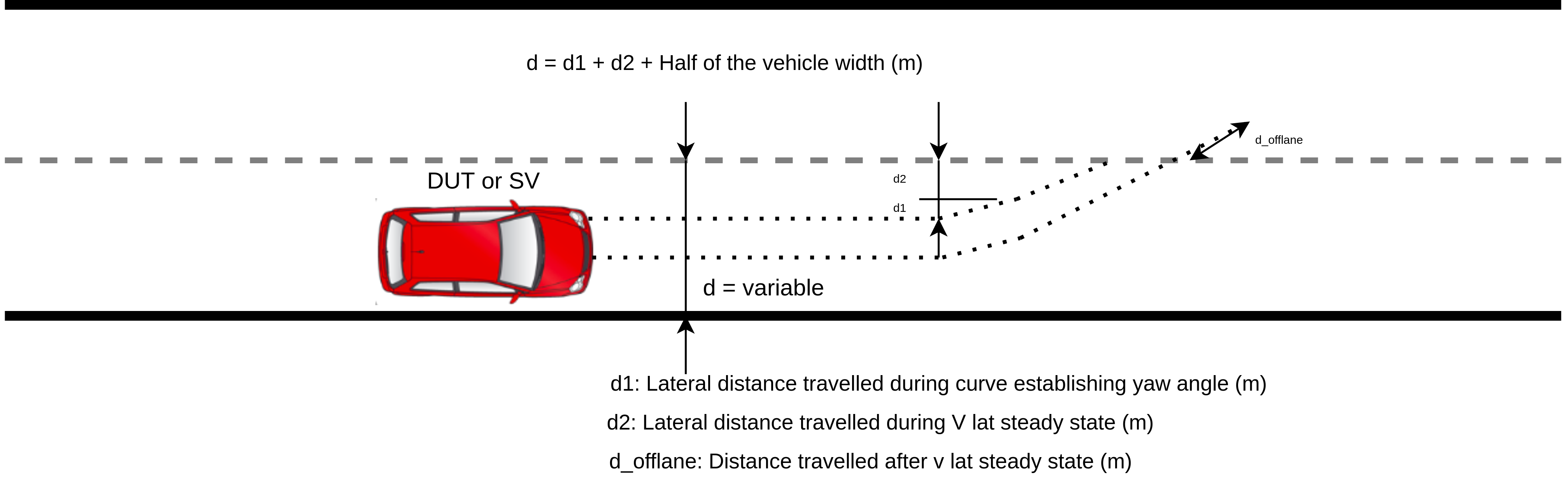
| d1 | length | [0.1..10]m | Lateral distance traveled during curve part of the test path |
| d2 | length | [0.1..10]m | Lateral distance traveled during straight line part of the test path |
| d_offlane | length | Spare distance to be traveled after the test path | |
| turning_side | right, left | ego turning side | |
| driver_signal | right_on, left_on, off | Ego's turn indicator |
463.3 Coverage metrics
| Item | Unit / Type | Range | Description |
|---|---|---|---|
| vut_speed_at_shape_start | kph | [10..100], every:5 | Actual VUT speed at shape start |
| vut_acceleration_at_shape_start | mpsps | [-5..5], every:2 | Actual VUT acceleration at shape start |
| planned_vut_lat_speed | mps | [0.1..1], every=0.1 | Planned VUT lateral speed |
| vut_abs_dist_center_to_lane_marking | m | [0..5],every=0.1 | VUT's lateral offset from center lane marking |
| vut_min_ttc_to_all_other_actors | s | [0..3000],every:300 | VUT's minimum TTC |
| vut_ttc_at_possible_collision | s | [0..3000],every: 300 | VUT's TTC at possible collision |
| vut_side_of_possible_collision | Side of VUT on which possible collision might occur | ||
| vut_speed_at_possible_collision | kph | [10..50],every:5 | VUT speed at possible collision |
| vut_acceleration_at_possible_collision | mpsps | range: [-2..4],every:2 | VUT acceleration at possible collision |
| lss_reaction_time | s | range:[1..20], every :2 | LSS reaction time after it started lane departure |
| vut_lat_mov_dist | cm | range:[0..500],every:20 | Lateral travel from lane departure to LSS engagement |
| vut_lat_speed_start | mps | range: [0.1..1], every: 0.1 | VUT lateral speed in mps at LSS engagement |
| driver_signal | left_on,right_on,off | Driver turn signal | |
| turning_side | right,left | Actual turning side | |
| cross_driver_signal_turning_side | Cross coverage of driver's turn signal state and actual turn side |
463.4 Checks
The check will fail if the following happens:
- LDW is not in active state during the scenario
463.5 CSV files with Lane departure parameters
$FTX/packages/adas/LSS/LDW/test_suites/test_suite_definitions/ego_lateral_movement
- ldw_lane_departure_main.csv
- ldw_lane_departure.csv