190. Speed Limit Watcher
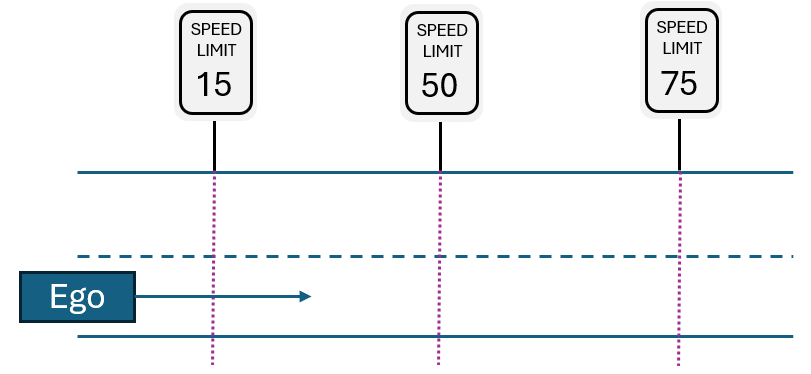
The speed_limit watcher monitors the current speed limit of the road the Ego drives on. It is based on the speed limit of the road element. Its primary purpose is to provide insight into the speed limit on the road. It uses the map.get_speed_limit() function to get the speed limit and detect any changes over time.
This watcher triggers when the road's speed limit changes, providing valuable context for interval-based analysis. For periods where the speed limit is unknown, the parameter create_interval_for_unknown_speed_limit controls whether an interval is created. If enabled, an interval will be recorded to indicate that the speed limit was unknown during that time.
190.0.1 Start condition
The speed_limit evaluator checks the road speed limit at every top.w_clk using the function map.get_speed_limit(), which returns the current speed limit of the road that the vehicle is driving on. A new interval starts when the Ego enters a new speed limit of the road element and continues until the speed limit changes.
190.0.2 End condition
The active interval ends when the speed limit of the road element changes.
190.1 Plot
190.2 Configuration parameters
The following parameters can be configured to customize the evaluator's behavior.
| Parameter | Type | Description | Default Value |
|---|---|---|---|
create_interval_for_unknown_speed_limit |
bool | Whether an interval is created when the speed limit is unknown | No default |
190.3 Metrics
The following metrics are recorded and tracked by the evaluator.
| Metric | Type | Description | Range | Unit |
|---|---|---|---|---|
speed_limit |
cover | Speed limit of the road on which the Ego is driving | [0..150] | kph |
190.4 Log and Error Messages
No error messages found.