102. Match scenario coverage functions
The following built-in functions are used within match scenarios for implementing coverage and KPI collection.
102.1 Sample, cover, and record constructs
Sample, cover, and record are used in match scenarios to collect coverage and key performance indicators (KPIs). These constructs are explained in the OSC_monitoring section.
Example
# Sample the start and end times of the lane-change phase of the cut-in scenario
var lane_change_start_time: time = sample(top.time ,@change_lane.start)
var lane_change_end_time: time = sample(top.time ,@change_lane.end)
# Compute the duration of the lane-change maneuver
var lane_change_duration: time = sample(lane_change_end_time - lane_change_start_time ,@end)
# Collect the duration as a cover point
cover(lane_change_duration, unit: s, range: [0..5], every: 1,
text: "Duration of cut in vehicle lane change")
Limitations
- Events used in sample(), cover(), and record() can only be scenario or phase start or end events. User defined events declared using
the
eventconstructs are not supported. - Expressions used in the above-mentioned constructs may only refer to data collected during the ingestion run.
102.2 collect()
Collect accumulates values of an expression during a run, starting at a start-event and ending at an end-event.
Syntax
collect_<exp-type>(exp: <exp>
[, measure: <collect_measure_type>]
[, text: <description>]
[, start_event: <start_event_string>]
[, end_event: <end_event_string>]
)
The collect() modifier is a family of modifiers where each member collects expressions of a specific type. Currently, the family includes:
- collect_time()
- collect_distance()
- collect_speed()
- collect_acceleration()
- collect_jerk()
Accessing collect results
You can access the collect() computed_result output field for later analysis with the cover() and record() modifiers.
Example
# Collect the minimal local longitudinal speed during the change lane phase of the cut-in scenario
cut_in_vehicle_local_min_speed_lon_record: top.collect_speed(measure: min,
exp: vehicle_actor.state.local_speed.lon,
start_event: "change_lane.start", end_event: "change_lane.end")
# Cover the result to analyze the bucketized values
cover(cut_in_vehicle_local_min_speed_lon,
expression: cut_in_vehicle_local_min_speed_lon_record.computed_result,
range: [0..55], every: 10,
unit: mps, text: "Minimum longitudinal local speed of cut in vehicle")
Limitations
- start_event and end_event can only be scenario or phase start or end events. User defined events declared using
the
eventconstructs are not supported. - provide start_event and end_event paths as strings, enclosed in double quotes.
- The Evaluation Pipeline does not flag any collected value related failures.
102.3 General built-in functions
The following functions may be used for coverage collection within monitor scenarios.
102.3.1 side_of_vehicle()
side_of_vehicle(ref_car: vehicle) -> av_rel_side
Returns the ref_car's relative position with respect to the Ego.
Parameters
| Name | Type | Description |
|---|---|---|
| ref_car | vehicle | The reference actor - its position relative to the Ego is returned |
Return value
One of the following enum values:
enum av_rel_side: [
SAME = 0,
LEFT = -1,
RIGHT = 1,
FAR_RIGHT = 2,
FAR_LEFT = -2,
UNKNOWN = 3
]
102.3.2 position()
position(ref_car: vehicle) -> length
Returns the Ego's distance from the reference vehicle.
Parameters
| Name | Type | Description |
|---|---|---|
| ref_car | vehicle | The reference actor - its distance from the Ego is returned |
Return value
The Ego's distance from the ref_car
102.3.3 lane_occupied_speed()
lane_occupied_speed(side: av_side, distance_behind: length, distance_ahead: length) -> speed
Returns the speed of the lead vehicle at the indicated side of the Ego. This function scans the lane adjacent to the Ego for traffic,
between the indicated distance_behind and distance_ahead. If there are any actors in the scanned region, the speed of the leading actor is returned. 0 is returned if the indicated lane is not occupied (no actors are present in the scanned region).
Parameters
| Name | Type | Description |
|---|---|---|
| side | av_side | Side of the Ego lane to scan for traffic |
| distance_behind | length | Distance behind of the Ego to scan for traffic |
| distance_ahead | length | Distance ahead of the Ego to scan for traffic |
Return value
The speed of the leading actor if found in the scanned region of the indicated lane, or 0 if no actors were found in that region.
102.3.4 lane_occupied_speed_by_time
lane_occupied_speed_by_time(side: av_side, time_behind: time, time_ahead: time) -> speed
Returns the speed of the lead vehicle found in the indicated side of the Ego. The function scans the lane adjacent to the Ego for
presence of any actors, between the indicated distance_behind and distance_ahead, measured by time. (The
distance is the Ego's speed divided by the time parameter). The speed of the leading actor found in the scanned
region is returned. 0 is returned if no actors were found in the region.
Parameters
| Name | Type | Description |
|---|---|---|
| side | av_side | Side of the Ego lane to scan for traffic |
| distance_behind | time | Distance (expressed as time) behind of the Ego to scan for traffic |
| distance_ahead | time | Distance (expressed as time) ahead of the Ego to scan for traffic |
Return value
The speed of the leading actor if found in the scanned region of the indicated lane, or 0 if no actors were found in that region.
102.3.5 speed_drop()
speed_drop(start_time: time, end_time: time, speed_gap_threshold: speed) -> bool
Returns true if the receiver vehicle's speed drops by more than the specified threshold within the indicated time interval.
Parameters
| Name | Type | Description |
|---|---|---|
| start_time | time | Beginning of speed drop observation interval |
| end_time | time | End of speed drop observation interval |
| speed_gap_threshold | speed | Limit of speed drop |
Return value
Returns true if the receiver speed dropped by more than the speed_gap_thrashold within the observation interval.
102.3.6 on_different_lane()
on_different_lane(ref_car: vehicle) -> bool
Returns true if the ref_car is not in the Ego lane.
Parameters
| Name | Type | Description |
|---|---|---|
| ref_car | vehicle | The reference actor |
Return value
Returns true if the ref_car is not in the Ego lane.
102.3.7 abs_distance()
abs_distance(distance: length) -> length
Returns the absolute value of distance.
Parameters
| Name | Type | Description |
|---|---|---|
| distance | length | The (signed) value of distance |
Return value
Returns the absolute value of distance.
102.3.8 ego_min_ttc()
ego_min_ttc(start_time: time, end_time: time) -> time
Returns the minimal time-to-collision for the Ego, as measured in the interval between start_time and end_time.
The TTC is computed for all actors on the scene and the minimal value is returned.
Parameters
| Name | Type | Description |
|---|---|---|
| start_time | time | Beginning of the TTC observation interval |
| end_time | time | End of the TTC observation interval |
Return value
The minimal TTC of the Ego computed during the observation interval.
102.3.9 num_of_parallel_lanes()
num_of_parallel_lanes() -> int
Returns the number of lanes on the Ego's road for traffic driving in the same direction as the Ego.
Return value
The number of lanes on the Ego's road that are driving in the same direction as the Ego.
102.3.10 num_of_anti_parallel_lanes()
num_of_anti_parallel_lanes() -> int
Returns the number of lanes on the Ego's road that are driving in the opposite direction of the Ego.
Return value
The number of lanes on the Ego's road that are driving in the opposite direction of the Ego.
102.3.11 road_speed_limit()
road_speed_limit() -> speed
Returns the Ego road speed limit.
Return value
The speed limit of the road the Ego is driving on.
102.3.12 road_width()
road_width() -> length
Returns the width of the road segment the Ego is driving on.
Return value
Returns the width of the road segment the Ego is driving on.
102.3.13 side_of_vehicle_in_lane()
side_of_vehicle_in_lane(ref_car: vehicle) -> av_side
Returns the side of ref_car relative to the Ego when the ref_car is in the Ego lane. In this case the ref_car may be a bicycle, motorcycle or any other narrow vehicle that could be adjacent to the Ego on its lane.
Parameters
| Name | Type | Description |
|---|---|---|
| ref_car | vehicle | The reference actor |
Return value
One of the following enum values:
enum av_side: [
UNKNOWN = 0,
LEFT = -1,
RIGHT = 1
]
102.3.14 side_of_vehicle_in_lane()
side_of_vehicle_in_lane(ref_car: vehicle) -> av_side
Returns the side of the ref_vehicle relative to the Ego. This function uses the lateral distance between the vehicles to determine the side and ignores map-related considerations.
Parameters
| Name | Type | Description |
|---|---|---|
| ref_car | vehicle | The vehicle on the side of the Ego |
Return value
One of the following enum values:
enum av_side: [
UNKNOWN = 0,
LEFT = -1,
RIGHT = 1
]
102.3.15 min_gap()
min_gap(ref_car: vehicle, start_time: time, end_time: time) -> length
Returns the minimal distance between the Ego and the ref_car. Distance is computed over a time interval between start_time and end_time and the minimal value is returned.
Parameters
| Name | Type | Description |
|---|---|---|
| ref_object | vehicle | The reference vehicle |
| start_time | time | Beginning of the observation interval |
| end_time | time | End of the observation interval |
Return value
The minimal distance computed over the observation interval.
102.3.16 min_ttc_with_ref_car()
min_ttc_with_ref_car(ref_car: vehicle, start_time: time, end_time: time) -> time
Returns the minimal Time To Collision (TTC) between the Ego and the ref_car. TTC is computed over a time interval between start_time and end_time and the minimal value is returned.
Parameters
| Name | Type | Description |
|---|---|---|
| ref_object | vehicle | The reference vehicle |
| start_time | time | Beginning of the observation interval |
| end_time | time | End of the observation interval |
Return value
The minimal TTC computed over the observation interval.
102.3.17 get_ego_lane()
get_ego_lane() -> int
Returns the Ego's lane number.
Return value
The Ego's lane number.
102.3.18 max_actors_in_interval
max_actors_in_interval(start_time: time, end_time: time, max_distance: length, min_speed: speed, stationary: bool) -> int
Returns the maximal number of actors in a single frame within the interval between start_time and end_time.
Actors are counted if their distance from the Ego is less than max_distance and their speed is over min_speed.
Stationary actors are excluded unless stationary is true.
Parameters
| Name | Type | Description |
|---|---|---|
| start_time | time | Beginning of the observation interval |
| end_time | time | End of the observation interval |
| max_distance | length | The maximal distance to look ahead for actors |
| min_speed | speed | Minimal speed of actors to consider |
| stationary | bool | Consider stationary actors if true |
Return value
The maximal number of qualifying actors in a single frame within the observation interval.
102.3.19 get_relative_time_distance()
get_relative_time_distance(car: vehicle)-> time
Returns the time it would take the Ego to reach the reference car's position. It is calculated by dividing the distance between the Ego and the reference car by their closing speed.
Parameters
| Name | Type | Description |
|---|---|---|
| ref_car | vehicle | The reference actor |
Return value
Returns the time it would take to reach the reference actor, assuming fixed speeds.
102.3.20 get_time_headway()
get_time_headway(ref_car: vehicle)-> time
Returns the time it would take the Ego to reach the current position of the ref_car, taking into account the Ego's speed
and ignoring the possibility that the reference actor may move from its current position.
Parameters
| Name | Type | Description |
|---|---|---|
| ref_car | vehicle | The reference actor |
Return value
Returns the time it would take the Ego to reach the reference actor's current position assuming the Ego moves at a constant speed.
102.3.21 abs_distance()
abs_distance(distance: length)-> length
Returns the absolute value of the distance provided (which may be negative).
Parameters
| Name | Type | Description |
|---|---|---|
| distance | length | A signed distance value |
Return value
The absolute value of the input distance value.
102.4 Junction related built-in functions
102.4.1 traversal_direction()
vehicle.traversal_direction() -> traversal_direction
Returns the traversal direction of the vehicle within a junction.
Return value
One of the following enum values:
enum traversal_direction: [
other = 0,
straight = 1,
right = 3,
backwards = 5,
left = 7,
unknown = 9
]
102.4.2 traffic_control_device()
traffic_control_device(max_distance_from_junction: length) -> traffic_control
Returns the type of traffic control implemented at a junction that is within the maximal distance from the vehicle.
Parameters
| Name | Type | Description |
|---|---|---|
| max_distance_from_junction | length | Maximal distance to look for traffic light |
Return value
One of the following enum values:
enum traffic_control: [none = 0, traffic_light = 1, stop_sign = 2, yield_sign = 3]
102.4.3 traffic_light_color_change()
traffic_light_color_change(start_time: time, end_time: time) -> tl_color_change
Returns the traffic light transition observed within the specified time interval.
Parameters
| Name | Type | Description |
|---|---|---|
| start_time | time | Time interval start |
| end_time | time | Time interval end |
Return value
One of the following enum values:
enum tl_color_change: [
unknown_to_unknown = 0,
unknown_to_green = 1,
unknown_to_yellow = 2,
unknown_to_red = 3,
green_to_unknown = 4,
green_to_green = 5,
green_to_yellow = 6,
green_to_red = 7,
yellow_to_unknown = 8,
yellow_to_green = 9,
yellow_to_yellow = 10,
yellow_to_red = 11,
red_to_unknown = 12,
red_to_green = 13,
red_to_yellow = 14,
red_to_red = 15,
no_traffic_light = 16
]
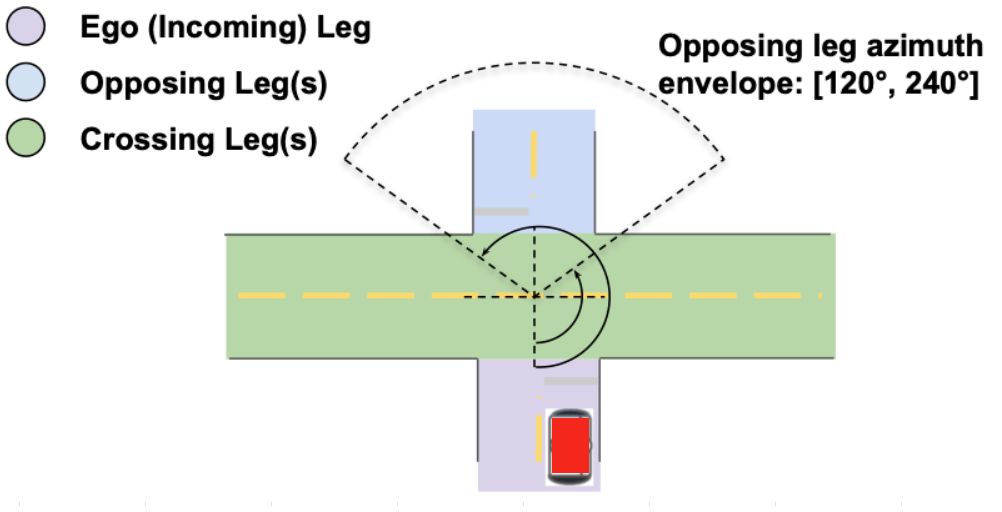
102.4.4 traversal_relative_direction()
traversal_relative_direction(ref_car: vehicle) -> traversal_relative_direction
Returns the traversal direction of the ref_car relative to the Ego. If called when the Ego is not by a junction, then the returned
direction is unknown.
Parameters
| Name | Type | Description |
|---|---|---|
| ref_car | vehicle | The reference actor whose junction traversal direction is returned |
Return value
One of the following enum values:
enum traversal_relative_direction: [
parallel_to_right = 0,
parallel_to_parallel = 1,
parallel_to_left = 2,
parallel_to_opposite = 3,
right_to_parallel = 4,
right_to_left = 5,
right_to_opposite = 6,
right_to_right = 7,
opposite_to_opposite = 8,
opposite_to_right = 9,
opposite_to_left = 10,
opposite_to_parallel = 11,
left_to_parallel = 12,
left_to_right = 13,
left_to_opposite = 14,
left_to_left = 15,
unknown = 16
]
ref_car angle, as in the diagram below.
102.4.5 traversal_type()
traversal_type(start_time: time, end_time: time) -> traversal_type
Returns the right-of-way status during the Ego's traversal of a junction with a traffic light. The default value is unprotected. If the Ego has the right-of-way such as driving straight at a green light, turning right at a green light, or turning left at a left arrow, the returned value is protected. If the traffic light changes during the traversal, the relevant transitional value is returned. For junctions with no traffic light, unprotectedis returned.
Return value
Returns one of the following enum values:
enum traversal_type: [
protected = 1,
unprotected = 2,
protected_to_unprotected = 3,
unprotected_to_protected = 4
]
102.4.6 max_num_of_lanes_in_oncoming_legs()
max_num_of_lanes_in_oncoming_legs() -> int
Returns the number of lanes for the widest road classified as oncoming (see traversal_relative_direction()).
Return value
Returns the number of lanes for the widest oncoming road.
102.4.7 max_num_of_lanes_in_crossing_legs()
max_num_of_lanes_in_crossing_legs() -> int
Returns the number of lanes for the widest road classified as crossing (see traversal_relative_direction()).
Return value
Returns the number of lanes for the widest crossing road.
102.4.8 max_num_of_lanes_in_incoming_legs()
max_num_of_lanes_in_oncoming_legs() -> int
Returns the number of lanes for the widest road classified as incoming (see traversal_relative_direction()).
Return value
Returns the number of lanes for the widest incoming road.
102.4.9 number_of_junction_legs()
number_of_junction_legs() -> int
Returns the number of roads entering or exiting the junction. A road that has both entering and exiting lanes is counted as one.
Return value
Returns the number of entering and exiting roads connected to the junction.
102.4.10 planned_path_complexity_index()
planned_path_complexity_index(start_time: time, end_time: time) -> int
Returns the number of potential paths in a junction that cross the Ego's path. This index reflects the complexity or difficulty of traversing the junction.
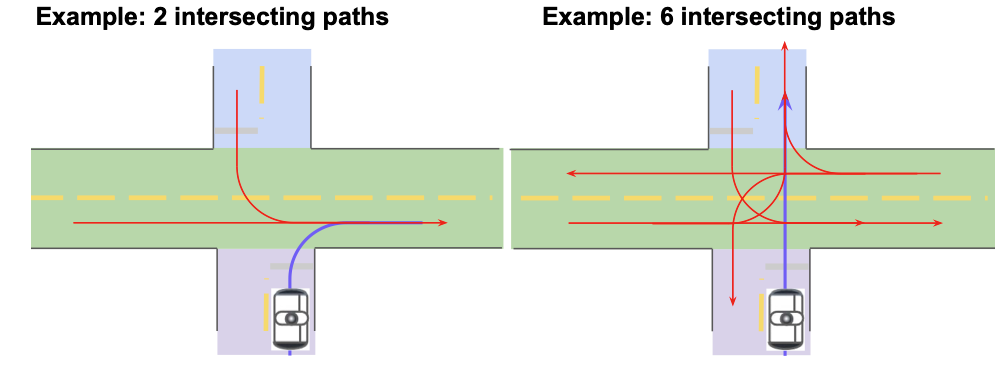
Return value
Returns the complexity index, which is the number of potential internal paths crossed during junction traversal.
102.4.11 lane_gap_post_junction
lane_gap_post_junction(ref_car: vehicle) -> int
Returns the absolute number of lane changes between the Ego and the ref_car if both end up on the
same road after exiting a junction. If the two actors don't end up on the same road, -1 is returned.
Parameters
| Name | Type | Description |
|---|---|---|
| ref_car | vehicle | The reference actor |
Return value
The number of lane changes between the Ego and the reference actor when they end up in the same lane as they exit a junction. If they are not in the same lane, -1 is returned.