407. AEB car to car introduction
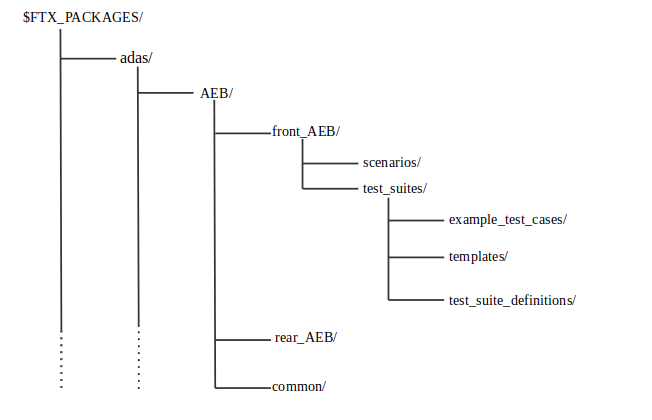
The Autonomous Emergency Braking (AEB) front_AEB library components are located in $FTX_PACKAGES/adas/AEB/front_AEB as shown in Figure 1. These tests explore the front aeb behavior of the VUT.
| Directory/File | Description |
|---|---|
| test_suite_definitions | A directory containing CSV files for executing front_AEB tests with Frun. |
| example_test_cases | A directory with scenario families containing example test files for running a single test with Foretify. |
| scenarios | A directory with scenario families containing the OSC2 source files for each scenario. |
| templates | A directory with scenario families containing the templates used to generate tests to be executed with Frun. |
To run a single test with Foretify and a specific simulator:
-
Invoke Foretify with a test file from the examples directory.
For example:
2. Enter quit at the Foretify> prompt after the run completes.$ foretify --load $FTX/packages/adas/AEB/front_AEB/test_suites/test_suite_definitions/ego_lane_change/t_front_aeb_ego_lane_change_to_left.osc \ --load $FTX/packages/adas/AEB/common/aeb_config/aeb_carla_config.osc --run
To run a set of tests with Frun:
-
Invoke Frun in batch mode with all the CSV files required for the set of tests that you chose.
For example:
frun --csv $FTX_PACKAGES/adas/AEB/front_AEB/test_suites/test_suite_definitions/ego_lane_change/front_aeb_lane_change_to_left.csv \ --csv $FTX_PACKAGES/adas/AEB/front_AEB/test_suites/test_suite_definitions/ego_lane_change/front_aeb_lane_change_to_left_main.csv \ --csv $FTX_PACKAGES/common/csv/sim_manually_driven_dynamic_config.csv \ --csv $FTX_PACKAGES/common/csv/map_config.csv \ --csv $FTX_PACKAGES/adas/AEB/common/test_suites/test_suite_definitions/user_aeb_config.csv \ --batch -
Review the regression results in the default work directory:
~/foretify/sessions/<timestamp>/<timestamp>/
To run all the Front AEB tests at once:
frun --file $FTX_PACKAGES/adas/AEB/front_AEB/test_suites/test_suite_definitions/all_front_aeb.txt
The all_front_aeb.txt file runs the following scenarios:
- aeb_c2c_rear_braking.csv
- aeb_c2c_rear_moving.csv
- aeb_c2c_rear_stationary.csv
- aeb_c2b_front_turn.csv
- aeb_c2c_front_turn.csv
- aeb_c2p_front_turn_across_path.csv
- front_aeb_lane_change_to_left.csv
- front_aeb_lead_vehicle.csv
- front_aeb_vehicle_cut_in.csv
- front_aeb_vehicle_cut_out_exposing_vehicle.csv
- front_aeb_ltap_ego_drive_and_adjacent_vehicles_turning_left_with_oncoming_vehicle.csv
- front_aeb_ego_drive_with_oncoming_vehicle_at_curved_junction.csv
- front_aeb_ego_left_turn_in_junction_with_oncoming_vehicle_turning_left.csv
- front_aeb_ltap_ego_drive_with_oncoming_vehicle_turning_right.csv
- front_aeb_ego_lane_change_to_left_at_junction_with_oncoming_vehicle.csv
- front_aeb_ltap_ego_drive_and_lead_vehicle_with_oncoming_vehicle_at_junction.csv
- front_aeb_scp_ego_drive_with_crosspath_vehicle.csv
- front_aeb_scp_ego_drive_and_stationary_vehicle.csv
- front_aeb_scp_oncoming_vehicle_driving_into_ego_path.csv
- front_aeb_ltap_ego_drive_and_oncoming_vehicle_turning_left_with_concealed_vehicle.csv
- front_aeb_scp_crosspath_vehicle_driving_into_ego_path.csv
- front_aeb_scp_crosspath_vehicle_driving_to_adjacent_lane_of_ego.csv
- front_aeb_scp_ego_drive_with_crosspath_vehicle_coming_to_stop.csv
- front_aeb_scp_ego_drive_with_crosspath_vehicle_on_curved_junction.csv
- front_aeb_ego_merge_vehicle_groups_on_ramp.csv